2.4 – Circular & Relative Motion Dec 08, 2017 Shawn AP Physics C Mechanics No comments yet 3.1 – Newton’s First Law & Free Body Diagrams Dec 08, 2017 Shawn AP Physics C Mechanics No comments yet 3.2 – Newton’s Second & Third Laws of Motion Dec 08, 2017 Shawn AP Physics C Mechanics No comments yet 3.3 – Friction Dec 08, 2017 Shawn AP Physics C Mechanics No comments yet 3.4 – Retarding & Drag Forces Dec 08, 2017 Shawn AP Physics C Mechanics No comments yet 1 2 3 4 5 … 8
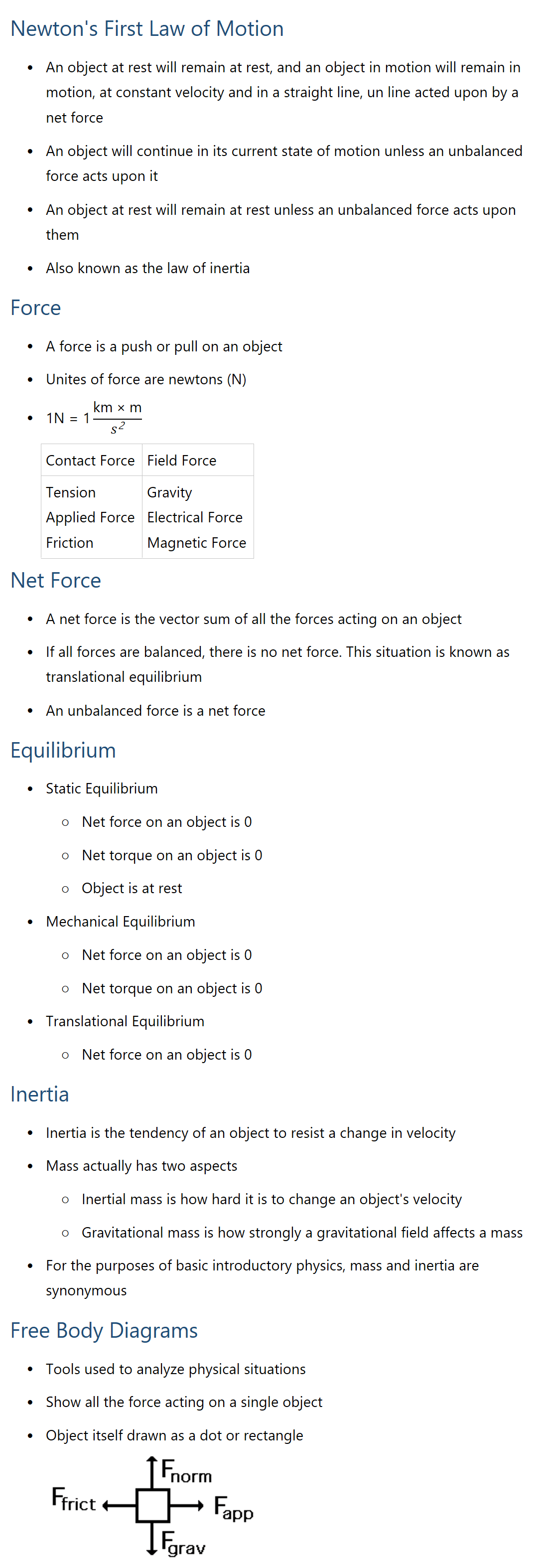
3.1 – Newton’s First Law & Free Body Diagrams Dec 08, 2017 Shawn AP Physics C Mechanics No comments yet
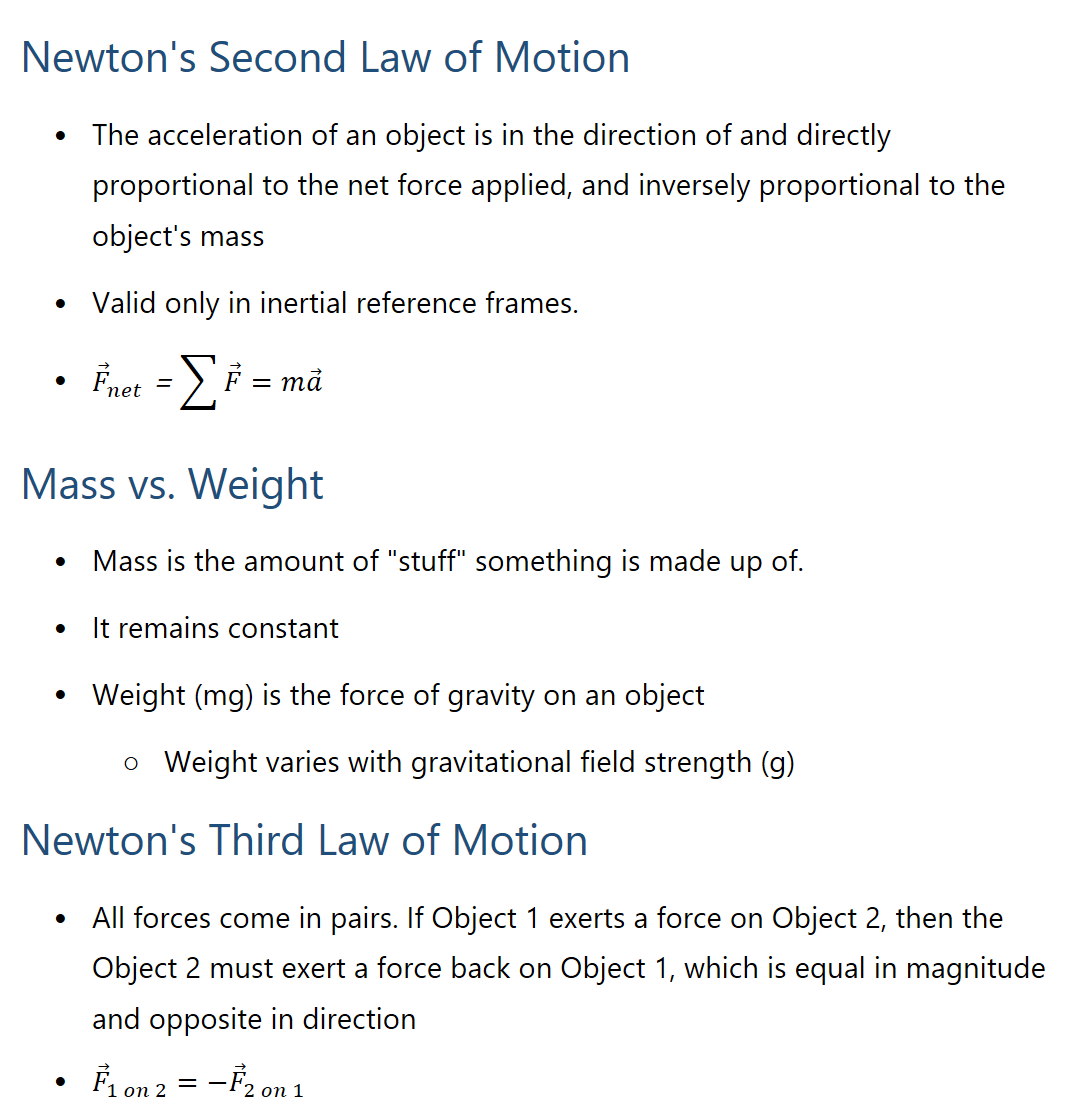
3.2 – Newton’s Second & Third Laws of Motion Dec 08, 2017 Shawn AP Physics C Mechanics No comments yet