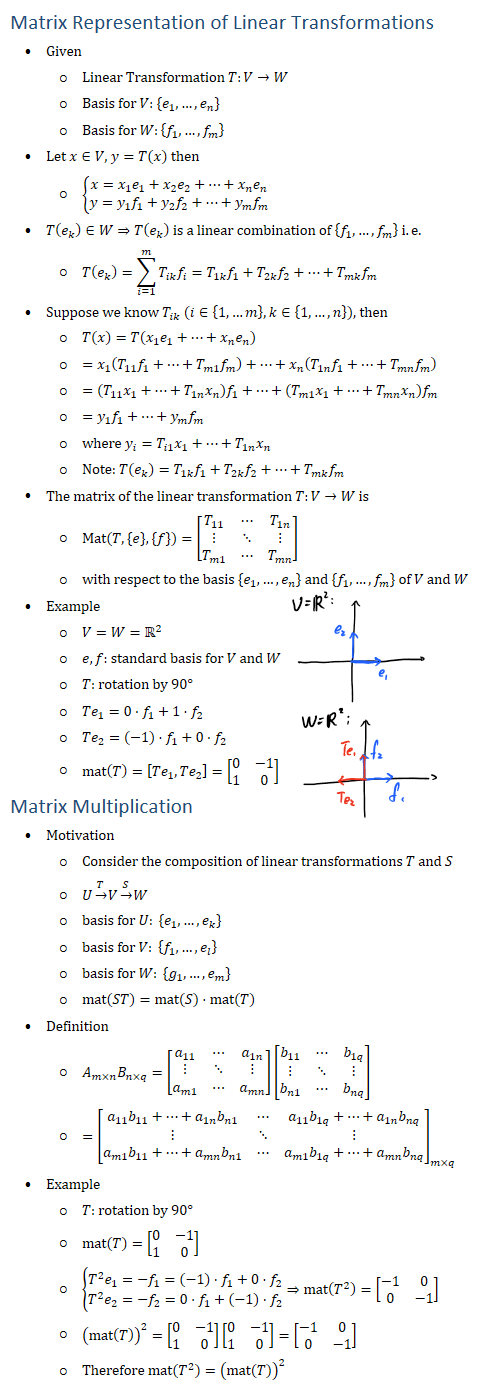
Matrix Representation of Linear Transformations • Given ○ Linear Transformation T:V→W ○ Basis for V: {e_1,…,e_n } ○ Basis for W:{f_1,…,f_m } • Let x∈V, y=T(x) then ○ {█(x=x_1 e_1+x_2 e_2+…+x_n e_n@y=y_1 f_1+y_2 f_2+…+y_m f_m )┤ • T(e_k )∈W⇒T(e_k ) is a linear combination of {f_1,…,f_m } i.e. ○ T(e_k )=∑_(i=1)^m▒〖T_ik f_i 〗=T_1k f_1+T_2k f_2+…+T_mk f_m • Suppose we know T_ik (i∈{1,…m},k∈{1,…,n}), then ○ T(x)=T(x_1 e_1+…+x_n e_n ) ○ =x_1 (T_11 f_1+…+T_m1 f_m )+…+x_n (T_1n f_1+…+T_mn f_m ) ○ =(T_11 x_1+…+T_1n x_n ) f_1+…+(T_m1 x_1+…+T_mn x_n ) f_m ○ =y_1 f_1+…+y_m f_m ○ where y_i=T_i1 x_1+…+T_1n x_n ○ Note: T(e_k )=T_1k f_1+T_2k f_2+…+T_mk f_m • The matrix of the linear transformation T:V→W is ○ Mat(T,{e},{f})=[■8(T_11&⋯&T_1n@⋮&⋱&⋮@T_m1&⋯&T_mn )] ○ with respect to the basis {e_1,…,e_n } and {f_1,…,f_m } of V and W • Example ○ V=W=R2 ○ e,f: standard basis for V and W ○ T: rotation by 90° ○ Te_1=0⋅f_1+1⋅f_2 ○ Te_2=(−1)⋅f_1+0⋅f_2 ○ mat(T)=[Te_1,Te_2 ]=[■8(0&−1@1&0)] Matrix Multiplication • Motivation ○ Consider the composition of linear transformations T and S ○ U→┴T V→┴S W ○ basis for U: {e_1,…,e_k } ○ basis for V: {f_1,…,e_l } ○ basis for W: {g_1,…,e_m } ○ mat(ST)=mat(S)⋅mat(T) • Definition ○ A_(m×n) B_(n×q)=[■8(a_11&⋯&a_1n@⋮&⋱&⋮@a_m1&⋯&a_mn )][■8(b_11&⋯&b_1q@⋮&⋱&⋮@b_n1&⋯&b_nq )] ○ =[■8(a_11 b_11+…+a_1n b_n1&⋯&a_11 b_1q+…+a_1n b_nq@⋮&⋱&⋮@a_m1 b_11+…+a_mn b_n1&⋯&a_m1 b_1q+…+a_mn b_nq )]_(m×q) • Example ○ T: rotation by 90° ○ mat(T)=[■8(0&−1@1&0)] ○ {█(T^2 e_1=−f_1=(−1)⋅f_1+0⋅f_2@T^2 e_2=−f_2=0⋅f_1+(−1)⋅f_2 )┤⇒mat(T^2 )=[■8(−1&0@0&−1)] ○ (mat(T))^2=[■8(0&−1@1&0)][■8(0&−1@1&0)]=[■8(−1&0@0&−1)] ○ Therefore mat(T^2 )=(mat(T))^2 VEIR: ” either Wilkin Their in E € is + Ten